
Agente humanoide Avatar de IA.
Un avatar con inteligencia artificial
El Unitree G1 es un robot cuadrúpedo de última generación, desarrollado para aplicaciones profesionales, educativas y recreativas. Combinando tecnología avanzada de inteligencia artificial y robótica, el G1 ofrece una solución flexible y robusta para diversas aplicaciones en terrenos complejos.

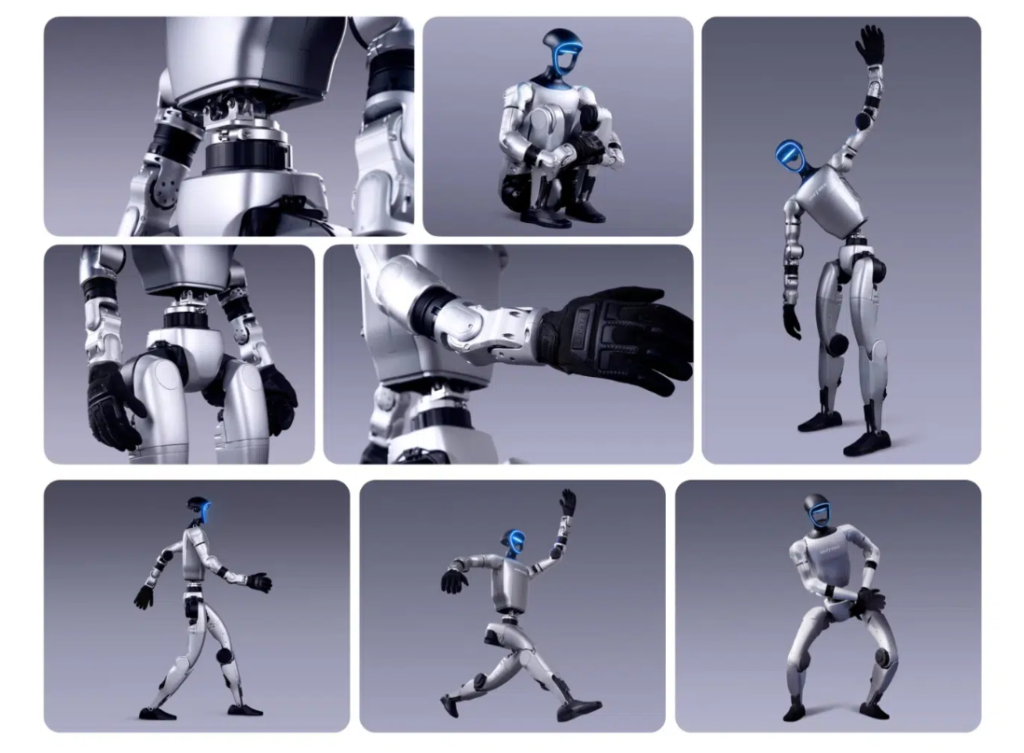
Flexibilidad más allá de las capacidades humanas
El Unitree G1 ofrece un ángulo de movimiento en las articulaciones extraordinariamente amplio, gracias a sus motores articulares, que varían entre 23 y 43, permitiendo una flexibilidad superior incluso a la de los humanos.
Batería de liberación rápida
La batería, de liberación rápida y de gran capacidad, asegura que el robot disponga de energía duradera para sus operaciones, permitiendo un rendimiento óptimo en diversas aplicaciones.
Aprendizaje por imitación y refuerzo
- Impulsada por la inteligencia artificial, la tecnología robótica de Unitree G1 evoluciona constantemente mediante el aprendizaje por imitación y refuerzo, lo que permite una mayor eficacia y capacidades avanzadas de movimiento y toma de decisiones».
- Combinando un control híbrido de fuerza y posición, el Unitree G1 es capaz de realizar tareas de manipulación con una precisión similar a la humana y es sensible y fiable a la hora de manipular objetos.
Más flexible y confortable
ESPECIFICACIONES TÉCNICAS
| Especificación | G1 | G1 EDU |
| Altura, Ancho y Grosor (En pie) | 1270 x 450 x 200 mm | 1270 x 450 x 200 mm |
| Altura, Ancho y Grosor (Plegado) | 690 x 450 x 300 mm | 690 x 450 x 300 mm |
| Peso (Con batería) | Aproximadamente 35 kg | Aproximadamente 35 kg + |
| Total de Grados de Libertad (Junta) | 23 | 23 – 43 |
| Grados de Libertad de una Pierna | 6 | 6 |
| Grados de Libertad de la Cintura | 1 | 1 + (Opcional 2 grados adicionales) |
| Grados de Libertad de un Brazo | 5 | 5 |
| Grados de Libertad de una Mano | / | 7 (+ 2 grados del pulso): Mano Dex3-1 de tres dedos con sensores táctiles (opcional) |
| Torque Máximo de la Junta de la Rodilla | 90 N·m | 120 N·m |
| Carga Máxima del Brazo | Aproximadamente 2 kg | Aproximadamente 3 kg |
| Longitud de la Pantorrilla + Muslo | 0,6 m | 0,6 m |
| Envergadura del Brazo | Aproximadamente 0,45 m | Aproximadamente 0,45 m |
| Espacio de Movimiento de las Juntas | Eje Z de la cintura: ±155° Articulación de la rodilla: 0165º Articulación de la cadera: P±154°, R-30+170°, Y±158° | Articulación de la cintura: Z±155°, X±45°, Y±30° |
| Características Eléctricas | ||
| Ruteo Eléctrico Hueco Completo de Juntas | Sí | Sí |
| Encoder de la Junta | Doble encoder | Doble encoder |
| Sistema de Refrigeración | Refrigeración por aire local | Refrigeración por aire local |
| Fuente de Alimentación | Batería de litio de 13 cadenas | Batería de litio de 13 cadenas |
| Potencia de Computación Básica | CPU de alto rendimiento de 8 núcleos | CPU de alto rendimiento de 8 núcleos |
| Sistema de Sensores | Cámara de profundidad + 3D LiDAR | Cámara de profundidad + 3D LiDAR |
| WiFi 6, Bluetooth 5.2 | Sí | Sí |
| Accesorios | ||
| Módulo de Alta Potencia de Cómputo | / | NVIDIA Jetson Orin (opcional) |
| Batería Inteligente (Liberación Rápida) | 9000 mAh | 9000 mAh |
| Cargador | 54V 5A | 54V 5A |
| Control Manual | Sí | Sí |
| Otros | ||
| Vida de la Batería | Aproximadamente 2h | Aproximadamente 2h |
| Actualización Inteligente OTA | Sí | Sí |
| Desarrollo Secundario | / | Sí |
| Período de Garantía | 8 meses | 1 año |